

摘要:本制作指南介绍了四足机器人的制作过程和实现快速行走的最佳实践。通过详细的步骤和技巧,让读者了解如何组装机器人结构、选择适当的运动控制硬件和软件、编程实现运动控制等关键方面。本指南旨在帮助读者成功构建出能够快速行走且性能稳定的四足机器人,为相关领域的研究和应用提供有力支持。
本文目录导读:
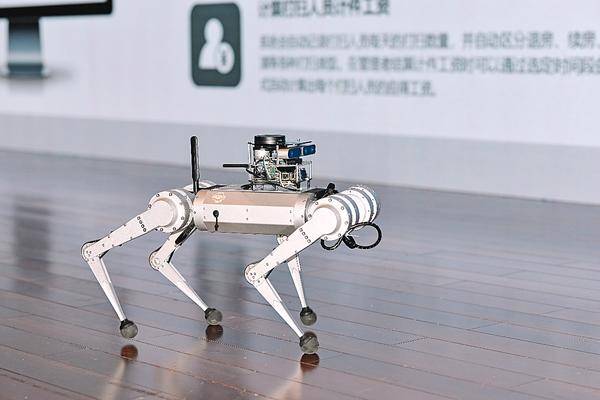
随着科技的飞速发展,四足机器人已成为研究领域的热门话题,如何使四足机器人行走得更快,是工程师和研究者们一直追求的目标,本文将详细介绍制作四足机器人时,如何实现其快速行走的关键步骤和要点。
四足机器人概述
四足机器人是一种模拟生物运动行为的机器人,其结构复杂且涉及多种技术领域,为了实现快速行走,我们需要关注机器人的设计、材料选择、驱动系统和控制系统等方面。
关键制作步骤
1、设计阶段
在设计四足机器人时,首先要考虑其结构和运动方式,为了实现快速行走,设计应遵循以下原则:
(1)轻量化:在保证结构强度的前提下,尽量选择轻质材料,以降低机器人整体重量。
(2)优化运动学结构:合理设计机器人的关节和步态,使其在运动过程中能量消耗最低。
(3)考虑地形适应性:设计能够适应不同地形环境的步态和机构,以提高机器人的实用性。
2、材料选择
材料的选择直接影响四足机器人的性能,为了实现快速行走,材料选择应遵循以下原则:
(1)高强度:选择具有高强度的材料,以保证机器人在运动过程中的结构稳定性。
(2)轻质:优先选择轻质材料,以降低机器人整体重量,提高运动速度。
(3)耐磨性:选择具有较好耐磨性的材料,以提高机器人在不同环境下的耐用性。
3、驱动系统
驱动系统是四足机器人的核心部分,直接影响机器人的运动性能,为了实现快速行走,需要关注以下要点:
(1)电机选择:选择功率大、效率高的电机,为机器人提供足够的动力。
(2)传动方式:选择合适的传动方式,如齿轮传动、皮带传动等,以提高传动效率。
(3)散热设计:确保驱动系统的散热性能良好,以防止电机过热影响性能。
4、控制系统
控制系统是四足机器人的大脑,负责协调各部件的运动,实现机器人的快速行走,为了实现快速行走,需要关注以下要点:
(1)算法优化:采用先进的运动控制算法,优化机器人的运动轨迹和步态。
(2)传感器应用:利用传感器实时感知机器人状态和环境信息,以便调整运动策略。
(3)实时反馈调整:通过实时反馈系统调整机器人运动参数,以实现最佳运动状态。
实现快速行走的最佳实践
1、优化设计:在设计阶段充分考虑机器人的运动性能和地形适应性,以实现最佳运动效果。

2、选用高性能材料:选择高强度、轻质、耐磨性好的材料,以提高机器人的性能。
3、优化驱动系统:选择功率大、效率高的电机和传动方式,确保驱动系统的性能稳定。
4、先进的控制系统:采用先进的运动控制算法和实时反馈系统,以实现机器人的快速行走。
5、调试与测试:对机器人进行充分的调试和测试,以验证其性能并改进设计。
实现四足机器人的快速行走需要综合考虑设计、材料、驱动系统和控制系统等方面,通过优化设计和选用高性能材料,结合先进的驱动系统和控制系统,可以显著提高四足机器人的运动性能,希望本文的介绍能为制作四足机器人的工程师和研究者提供有益的参考。
 冀ICP备2022021101号-1
冀ICP备2022021101号-1