

工业机器人的转弯半径是指机器人在运行过程中,完成转向动作时所需的最小空间半径。这一参数对机器人的机动性和作业效率至关重要。较小的转弯半径意味着机器人能在更狭窄的空间内灵活操作,适应复杂多变的工业环境,提高生产线的自动化程度和作业效率。优化工业机器人的转弯半径设计,有助于提升机器人的工作性能和应用范围。
本文目录导读:
随着科技的飞速发展,工业机器人已广泛应用于汽车制造、电子装配、物流仓储等各个领域,在这些应用中,工业机器人的性能参数对于其工作效率及作业精度具有重要影响,工业机器人的转弯半径是一个关键参数,本文将详细探讨工业机器人转弯半径的作用及其在实际应用中的重要性。
工业机器人的转弯半径
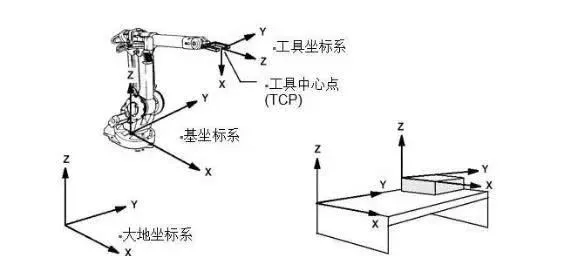
工业机器人的转弯半径是指机器人在进行转向操作时所需要的最小空间半径,这一参数受到机器人结构设计、电机性能、传动系统以及控制系统等因素的影响,转弯半径的大小直接关系到机器人在复杂环境中的灵活性和作业效率。
工业机器人转弯半径的作用
1、灵活性
转弯半径较小的工业机器人能够在狭窄的空间内进行精确操作,适应复杂的工作环境,在汽车制造业中,工业机器人在进行焊接、装配等作业时,需要频繁地进行转向操作,较小的转弯半径意味着机器人能够更灵活地应对生产线上的各种需求,提高生产效率。
2、作业效率
工业机器人的转弯半径对其作业效率产生直接影响,在物流仓储、搬运等应用中,机器人需要快速、准确地完成路径规划及移动操作,一个较小的转弯半径可以使机器人在繁忙的环境中更有效地移动,减少无效行程和时间损耗,从而提高作业效率。
3、精度和稳定性
工业机器人的转弯半径与其运动精度和稳定性密切相关,在高精度应用场合,如电子装配、精密加工等,机器人需要在高速运动状态下进行精确转向,较小的转弯半径可以保证机器人快速响应并准确执行指令,从而提高作业精度和稳定性。
实际应用中的影响因素
1、工作环境
工业机器人的工作环境对其转弯半径的要求具有重要影响,在狭窄、复杂的环境中,需要机器人具备较小的转弯半径以应对各种操作需求,而在开阔环境中,机器人的转弯半径要求相对较低。
2、机器人类型
不同类型的工业机器人具有不同的转弯半径,关节型机器人具有较高的灵活性,可以在狭小空间内进行精确操作;而轮式机器人则具有较大的转弯半径,适用于在开阔地面上进行高效移动。
3、控制系统和技术
先进的控制系统和技术可以帮助工业机器人实现更小的转弯半径,通过优化算法和精确的传感器技术,可以提高机器人的运动控制精度和响应速度,从而减小转弯半径。
工业机器人转弯半径在其应用中具有重要作用,它不仅关系到机器人在复杂环境中的灵活性,还直接影响到机器人的作业效率和精度,在实际应用中,需要根据工作环境、机器人类型以及控制系统和技术等因素来选择合适的转弯半径,随着技术的不断进步,工业机器人将在更小转弯半径的实现上取得更大突破,为各个领域带来更高的生产效率和作业精度。
展望
随着人工智能、机器学习等技术的不断发展,工业机器人的运动控制和路径规划将更加智能和精准,工业机器人将在更小转弯半径的基础上,实现更高的运动速度和作业精度,为制造业、物流业等领域带来更大的价值,随着新型材料和新技术的应用,工业机器人的结构将更为紧凑,从而实现更小的转弯半径,适应更多复杂环境中的应用需求,工业机器人转弯半径的研究与应用将推动工业机器人技术的不断进步,为工业自动化领域的发展注入新的动力。
 冀ICP备2022021101号-1
冀ICP备2022021101号-1