

摘要:机器人行走的四种程序包括预设路径规划、自主导航、遥控操作和自适应地形导航。预设路径规划是通过预设路径点,使机器人按照设定的轨迹行走;自主导航则是通过传感器识别环境并自主决策;遥控操作是通过人为控制机器人的行走方向;自适应地形导航则是机器人能够根据地形变化自动调整行走策略。这些程序共同实现了机器人的高效、稳定行走。
本文目录导读:
随着科技的飞速发展,机器人技术已成为现代工程领域的重要研究对象,机器人的行走程序是实现其运动功能的关键部分,本文将详细介绍四种机器人行走的程序,包括路径规划、运动控制、感知与避障以及协同控制。
路径规划程序
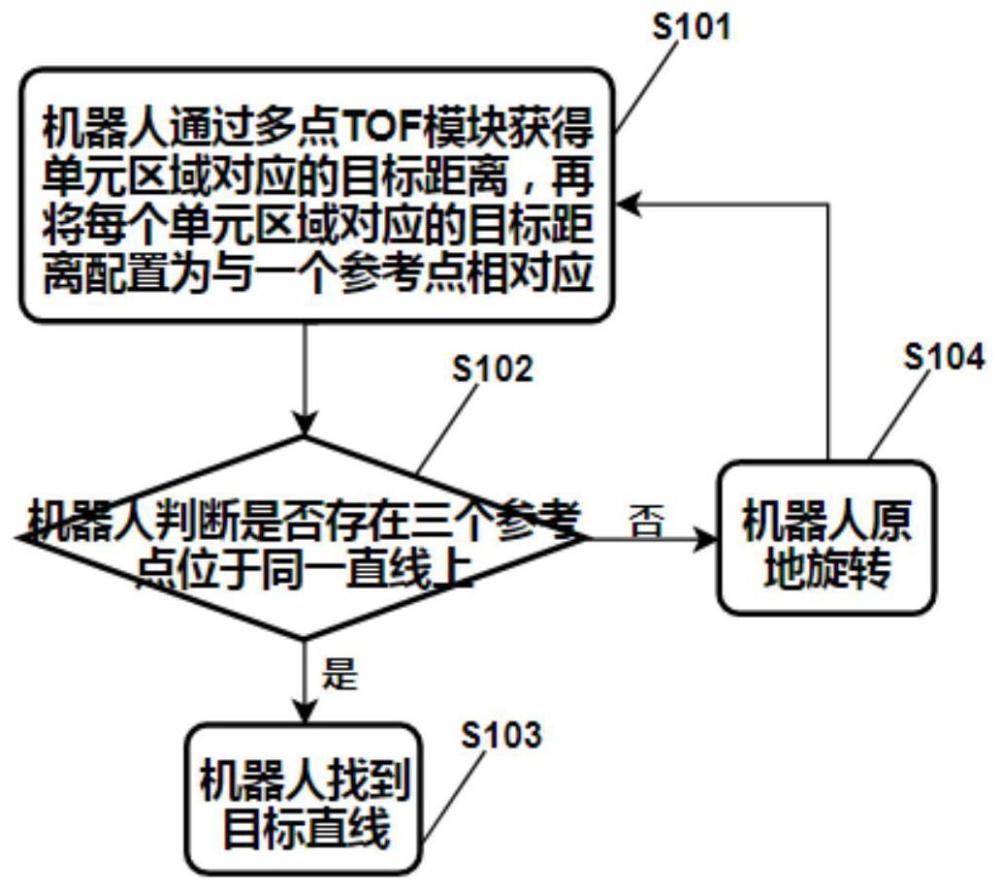
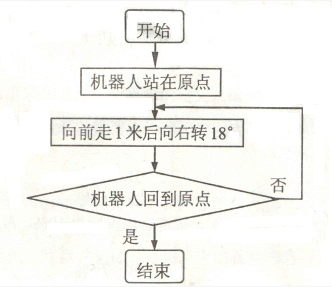
路径规划是机器人行走的基础,它涉及到如何根据机器人的任务需求,为其规划一条从起点到终点的最优路径,路径规划程序通常包括全局路径规划和局部路径规划,全局路径规划主要基于地图信息,为机器人提供整体的导航策略,而局部路径规划则更注重实时环境信息,使机器人在复杂环境中能够灵活调整行走路径。
运动控制程序
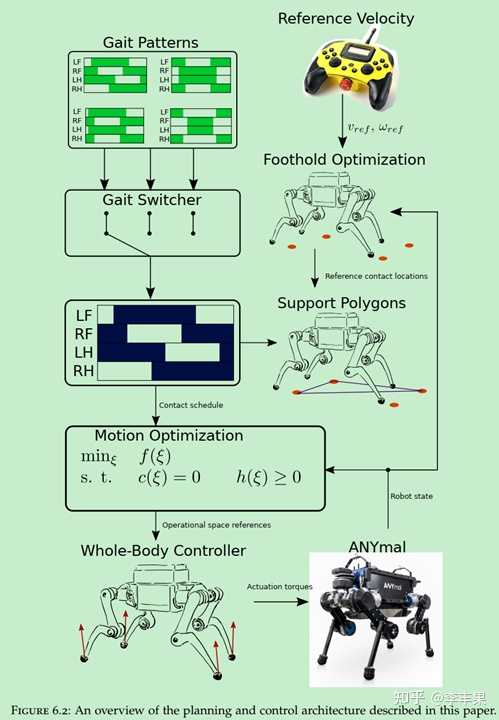
运动控制程序是机器人行走的核心,它通过控制机器人的关节和动力系统,实现机器人的行走、转向、加速和减速等动作,运动控制程序通常包括位置控制、速度控制和力控制等,位置控制通过精确控制机器人的位置,实现机器人行走的精确性;速度控制则关注机器人的行走速度,以满足任务需求;力控制则涉及到机器人在行走过程中与环境的交互力。
感知与避障程序
感知与避障程序是机器人在行走过程中实现自主导航的关键,通过集成各种传感器,如摄像头、红外传感器、超声波传感器等,机器人能够实时感知周围环境,识别障碍物,感知与避障程序通过对传感器数据的处理和分析,为机器人提供避障策略,确保机器人在行走过程中能够安全避开障碍物。
协同控制程序
协同控制程序是多机器人系统行走的关键,在多个机器人协同完成任务的情况下,协同控制程序负责协调各机器人的行动,确保它们能够相互配合,高效完成任务,协同控制程序通常包括任务分配、信息共享和协同决策等,通过优化协同控制程序,可以提高多机器人系统的整体性能,实现更高效、更智能的行走。
四种程序的相互关系及实际应用
路径规划程序为机器人提供行走的目标和方向,运动控制程序则负责实现机器人的具体行动,感知与避障程序为机器人在行走过程中提供安全保障,而协同控制程序则负责多机器人系统的协调配合,这四种程序相互关联,共同实现机器人的行走功能。
在实际应用中,这四种程序根据机器人的任务需求和场景特点进行灵活调整,在工厂生产线中,机器人可以通过路径规划程序规划固定的行走路径,通过运动控制程序精确完成装配任务,在复杂环境中,机器人则需要依赖感知与避障程序实现自主导航,在多机器人系统中,协同控制程序则负责协调各机器人的行动,提高整体效率。
机器人行走的四种程序——路径规划、运动控制、感知与避障以及协同控制,共同实现了机器人的行走功能,随着科技的不断发展,这四种程序将不断优化和完善,使机器人在各个领域的应用更加广泛和深入,随着人工智能和机器学习技术的发展,机器人的行走程序将更加智能和自主,为人类社会带来更多的便利和价值。
 冀ICP备2022021101号-1
冀ICP备2022021101号-1