
摘要:本实验报告主要介绍了机器人左转右转以及前进后退的实验过程。通过对机器人的操作,测试了其在不同方向上的运动性能和响应速度。实验过程中详细记录了数据,并对结果进行了分析。本实验旨在提高机器人运动控制的准确性和稳定性,为机器人进一步的应用和研究提供基础。
本文目录导读:
随着科技的飞速发展,机器人技术已经成为当今时代的重要研究领域之一,为了更好地掌握机器人的运动控制原理,我们进行了一系列关于机器人左转、右转、前进和后退的实验,本报告旨在阐述实验过程、分析实验结果,并得出结论。
实验目的
1、掌握机器人的基本运动控制原理;
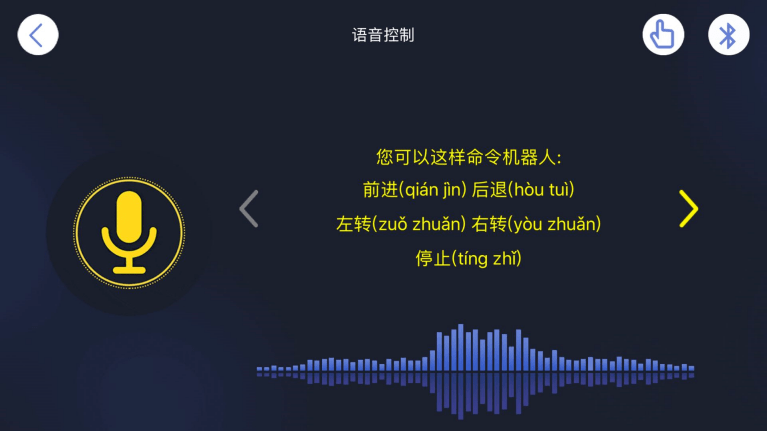
2、学习机器人的左转、右转、前进和后退的控制方法;
3、分析机器人在不同运动状态下的性能表现。
实验设备
1、机器人模型;
2、控制器;
3、电源;
4、传感器;
5、数据采集与分析系统。
实验原理
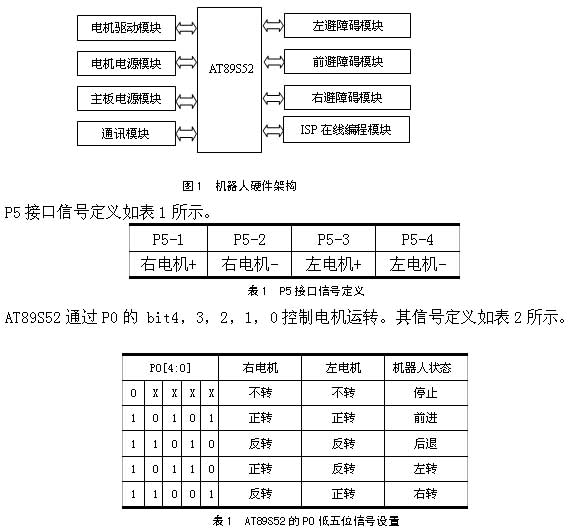
机器人的运动控制主要依赖于控制器对电机和传感器的控制,通过控制电机的转动方向和转速,可以实现机器人的前进、后退、左转和右转,传感器用于获取机器人运动过程中的位置、速度和加速度等信息,以便对机器人的运动状态进行实时监控和调整。
实验步骤
1、搭建实验平台,连接机器人模型、控制器、电源、传感器及数据采集与分析系统;
2、对机器人进行初始化设置,包括设定初始位置、速度和加速度等参数;
3、编写控制程序,实现机器人的左转、右转、前进和后退动作;
4、运行实验,观察并记录机器人在不同运动状态下的表现;
5、收集实验数据,利用数据采集与分析系统对实验数据进行处理和分析;
6、根据实验结果,调整机器人参数,优化运动性能;
7、撰写实验报告,总结实验过程和结果。
实验过程
1、在实验平台上搭建机器人模型,并连接各设备;
2、对机器人进行初始化设置,设定初始位置、速度和加速度等参数;
3、编写控制程序,实现机器人的左转、右转、前进和后退动作,在编写程序时,我们使用了PWM(脉宽调制)技术来控制电机的转速和方向;
4、运行实验,观察机器人的运动状态,在实验中,我们发现机器人在左转和右转时,由于轮子的摩擦力矩和轮径差异,会出现一定的偏差,在前进和后退时,机器人的速度受到电源供电稳定性的影响,电源波动会导致速度波动;
5、利用数据采集与分析系统收集实验数据,包括机器人的位置、速度、加速度以及电机的工作状态等;
6、根据实验结果,调整机器人参数,如优化轮子的摩擦力矩、调整电机转速等,以优化机器人的运动性能;
7、重复进行实验,观察参数调整后的效果,并记录实验数据。
实验结果与分析
1、实验数据显示,机器人在左转和右转时存在一定的偏差,通过优化轮子的摩擦力矩和调整电机转速,可以有效减小偏差;
2、在前进和后退过程中,电源波动对机器人速度的影响较大,采用稳定的电源供电,可以提高机器人的运动精度;
3、通过实验数据的分析,我们发现机器人在不同运动状态下的性能表现与参数设置密切相关,优化参数设置可以提高机器人的运动性能;
4、实验过程中,我们还发现传感器在机器人运动控制中起着重要作用,准确的传感器数据可以帮助我们实时监控和调整机器人的运动状态。
通过本次实验,我们掌握了机器人的基本运动控制原理,学会了机器人的左转、右转、前进和后退的控制方法,实验结果表明,机器人在不同运动状态下的性能表现与参数设置密切相关,优化参数设置和采用稳定的电源供电可以提高机器人的运动精度和性能,传感器在机器人运动控制中起着重要作用,本次实验为我们进一步研究和开发机器人提供了有益的参考。
 冀ICP备2022021101号-1
冀ICP备2022021101号-1