

摘要:,,本文介绍了机器人的转动关节分类及其形式,探讨了机器人灵活性的来源。机器人转动关节是机器人运动的重要组成部分,其分类包括旋转关节、滑动关节和弯曲关节等。不同类型的关节形式赋予了机器人在不同方向上的灵活运动能力。通过了解机器人转动关节的分类和特点,可以更好地理解机器人的灵活之源,为机器人的设计和应用提供理论基础。
本文目录导读:
随着科技的飞速发展,机器人技术已经成为现代工业、农业、医疗、军事等领域的重要组成部分,机器人的转动关节是其实现各种复杂动作的关键所在,对于机器人的性能具有决定性的影响,根据机器人的应用场景和性能需求,机器人转动关节可分为多种类型,本文将重点探讨机器人转动关节的两大主要形式:传统机械关节和现代智能关节。
机器人转动关节概述
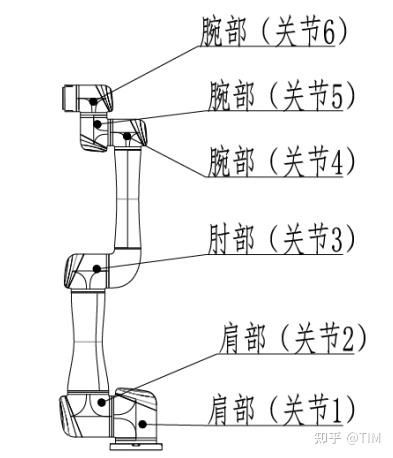
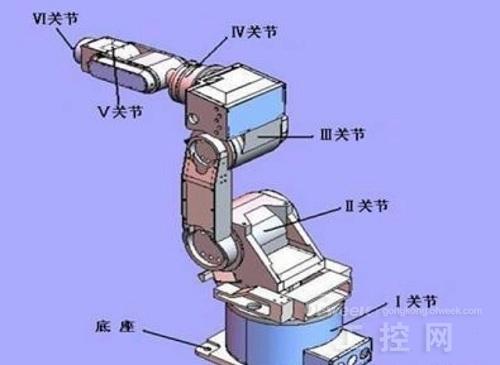
机器人转动关节是机器人运动的重要组成部分,它允许机器人各部分之间发生相对运动,从而实现机器人的各种动作,机器人转动关节的设计复杂性、精度和稳定性直接影响着机器人的整体性能,根据机器人的需求和设计,机器人转动关节可分为多种类型,其中最常见的两种类型为传统机械关节和现代智能关节。
传统机械关节
传统机械关节是机器人转动关节的一种基本形式,主要包括旋转关节、弯曲关节和滑动关节等,这些关节主要通过机械方式实现运动,例如齿轮、轴承和连杆等,传统机械关节的优点在于其结构简单、制造成本低、维护方便,由于传统机械关节缺乏传感器和智能控制系统,其运动精度和稳定性受到一定限制,传统机械关节对于复杂的运动轨迹和高速运动难以实现有效的控制。
现代智能关节
现代智能关节是随着科技的发展而出现的一种新型机器人转动关节,与传统机械关节相比,现代智能关节具有更高的运动精度和稳定性,现代智能关节集成了传感器、驱动器、控制器等多种先进技术,能够实现复杂的运动控制和自适应调节,现代智能关节的主要类型包括电动关节、液压关节和气动关节等,这些智能关节可以根据机器人的需求进行定制,实现机器人的高精度、高速运动和高负载能力。
机器人转动关节的两种形式比较
1、精度和稳定性:现代智能关节在运动精度和稳定性方面优于传统机械关节,现代智能关节通过集成传感器和智能控制系统,可以实时监测和调整关节的运动状态,从而实现高精度的运动控制。
2、控制复杂性:传统机械关节的控制相对简单,主要依赖于物理机械原理,而现代智能关节的控制更为复杂,需要集成传感器、驱动器、控制器等多种技术,对控制系统的设计和实现有更高的要求。
3、适用范围:传统机械关节适用于对精度和速度要求不高的场景,如简单的装配线等,而现代智能关节适用于对精度和速度要求较高的场景,如精密加工、医疗手术等。
机器人转动关节是机器人实现各种动作的关键部分,其性能直接影响着机器人的整体性能,传统机械关节和现代智能关节是机器人转动关节的两种主要形式,传统机械关节结构简单、制造成本低,但运动精度和稳定性有限,现代智能关节通过集成传感器、驱动器、控制器等技术,实现了高精度的运动控制和自适应调节,适用于对精度和速度要求较高的场景,随着科技的不断发展,现代智能关节将在机器人领域发挥越来越重要的作用。
展望
随着科技的进步,机器人转动关节的性能将进一步提高,机器人转动关节将更加注重智能化、高精度和高负载能力的发展,随着机器学习、人工智能等技术的发展,机器人转动关节将实现更高级的自适应控制和自主学习能力,这将使机器人在更多的领域得到应用,为人类的生产和生活带来更多的便利。

本文重点探讨了机器人转动关节的两种主要形式:传统机械关节和现代智能关节,通过对两种关节形式的比较,我们发现现代智能关节在精度、稳定性和控制复杂性等方面优于传统机械关节,随着科技的不断发展,现代智能关节将在机器人领域发挥越来越重要的作用,展望未来,机器人转动关节将更加注重智能化、高精度和高负载能力的发展。
 冀ICP备2022021101号-1
冀ICP备2022021101号-1